マイナビニュース 10月17日(水)14時10分配信
新エネルギー・産業技術総合開発機構(NEDO)、千葉工業大学(千葉工大)、移動ロボット研究所の3者は10月16日、小型高踏破性遠隔移動装置狭隘(きょうあい)空間先行探査型移動ロボット「Sakura(櫻)」の実機(画像1・2)を、17~19日に開催される展示会「Japan Robot Week 2012」の会場である東京ビッグサイトにて、プレス公開を実施した。
螺旋階段やがれきなどをNEDOブースに用意してあり、そこで実機による走向デモンストレーションも実施。動画も含めて、その模様をお届けする。
福島第一原子力発電所の事故に伴い、NEDO、千葉工大、東北大学、国際レスキューシステム研究機構の4者で開発した純国産の探査ロボット「Quince(クインス)」(画像3)が急遽改造され、原子炉建屋内の探索を実施したことは記憶に新しい(記事はこちらなど)。
その後、原子炉建屋内での利用を前提として完全に設計を1から行った「Rosemary(ローズマリー)」(画像4)が2012年7月に発表された(記事はこちら)。
現状、Rosemaryは東京電力が放射線線量計をロボット本体が赤外線でデータを受け取れる海外メーカー製のものに統一するという関係から、待機状態となっているが、そうしている内に早くもさらにその次のロボットとして、今回のSakuraが開発されたというわけだ。
Sakuraは、CYBERDYNE(サイバーダイン)の「災害対策用ロボットスーツHAL」(画像5)などと共に、平成23年度と24年度の2年間で予算総額9億9600万円というNEDOの「災害対応無人化システム研究開発プロジェクト」(画像6)によって開発が進められているロボットである。
こうしたプロジェクトで開発されたものは、年度末になって披露されるが一般的だが、今回は年度途中にも関わらず、早期の現場への投入が望まれていることから、急遽今回の発表になったという状況だ。
開発の指揮を執ったのは、RosemaryやQuinceと同様に、過去の千葉工大の探査・レスキューロボットを開発してきた、千葉工業大学未来ロボット技術研究センター(fuRo)副所長 兼 大学ベンチャーの移動ロボット研究所を立ち上げた小柳栄治氏だ(画像7)。
今回のSakuraという命名については、小柳氏のロボットはアルファベット順で花の名を冠するのがしきたりなので、Rの次なので、Sakuraとなった。この花が選ばれ、日本名では「櫻」と旧字体が使われている理由には、福島原発を1日でも安全な状況にして廃炉にするため、日本の技術で「元に戻す」という願いが込められている。
Sakuraの大きな特徴は、まずRosemaryやQuinceに比べて、小型化が図られていることだ(画像4)。Rosemaryは全長700mm×全幅500mm×全高170mm、Quinceは全長665mm×全幅480mm×全高225mmだが、Sakuraは全長500mm×全幅390mm×高さ220mmとなっている。また、フリッパーの厚みも非常に薄いのが特徴だ(画像8)。重量はRosemaryが45kg、Quinceが26kgで、Sakuraは32kgとなっている。
小型化が行われた理由は、原子炉建屋の地下が、「狭い」からだ。格納容器、圧力抑制室、多数の配管などがある地下には、汚染された冷却水が溜まっている。東京電力が現在最も成し遂げたいことが、この冷却水がどこから漏れているかを把握することであり、そのためには確実に地下にたどり着けるロボットが必要なのだ。
それを実現するためには、次に挙げるいくつかの条件を満たさないとならない。まず1つ目は、原子炉建屋の地下部分の階段の大多数は地上部分の40度よりもさらに傾斜がきつい42度であること。そして2つ目が、地下の階段と踊り場の幅が地上部分の91cmに対して、70cmと非常に狭いことだ。
42度という傾斜は人ですら下りる時は怖くなる角度なのだが、すでにQuinceで達成しているので技術的な問題はない。ではなぜQuinceが到達できなかったかというと、この70cmという狭さが問題なのだ(画像9)。
Quinceは全長が665mmもあることから、踊り場での旋回ができず、地下まで下りられなかったのである。これは、東電側が小柳氏らに建物の寸法に関するデータを伝達していなかったミスがあり、事前に対策を施せなかったというわけだ。
しかも、条件は以上の2つだけではない。3つ目が強烈で、圧力抑制室の上部に向かうために短いとはいえ、今度は階段を上る必要があるのだが、その階段が52度という上り出した途端に後ろにひっくり返ってもおかしくない急傾斜なのだ。さすがに、この角度はQuinceはもちろん、Rosemaryでも難しい。
さらに4つ目として、圧力制御室の上部にあるキャットウォークも足場の構造がクセモノだ。キャットウォークは外周の直径が10m、そして幅2mほどの円形をしているのだが、足場は鋼材を格子状に組んだ「グレーチング」である。グレーチング上では、通常のクローラのツメでは引っかかってしまうため、方向転換はもちろんのこと、前後進すらままならないこともあるのだ。
それをクリアするため、新開発のクローラを今回開発協力した4企業の内の1つ、バンドー化学が提供している(画像10)。デモ機が仮に装備していたメインのクローラは、外側のツメが大きく、内側のツメが小さく作られており、通常の路面なら走りやすいのだが、グレーチングに引っかかってしまう。そこで、ツメが内も外もひとつながりになっていて、クローラの幅に等しいものが開発され、それならグレーチング上も問題なく走れるそうである。
ちなみに、スポンジ型のクローラが一番吸着力があって走破能力が高くなるそうだが、放射性物質を吸着してしまうので、原子力事故現場ではつかえないそうだ。
なお、汚染水がどこから漏れているかを確かめるために工夫されたのが、初めて搭載された高指向性マイクロフォンだ(画像11)。地下の汚染水の水面より上に漏洩箇所があれば水音が立つはずだし、なければ水面下ということがわかる。水面上なら音でおおよその見当はつけられるわけで、それを確かめるための任務が、Sakuraには課せられるというわけだ。
また、バッテリ交換作業ゼロ(汚染された機体のバッテリ交換作業をすると、作業者の被曝線量が増えてしまう)のプラグイン充電機構もRosemaryから継承(画像12)。これは、アイ・ディー・エクスが1カ月半という短い期間で機器を開発したという。そうした各部の説明は画像の通り(画像13・14)。
さらに、東京消防庁の2代目レスキューロボットの「ロボキュー」の開発で知られる菊池製作所は金属加工で、モータードライバの開発ではテクノクラフトがそれぞれ協力をしたということだ。ちなみに移動ロボット研究所とは、小柳氏が立ち上げた千葉工大のベンチャー企業である。
そしてそのほかのスペックだが、連続稼働時間は3時間。これまでの経験から、おおよそどの場所への探索でも平均すると1時間に50mSvの被曝量となることから、3時間でも15mSv、各種機器の放射線耐性は最も弱いカメラでもテストで167Svまでは大丈夫だったということで、200Svまで稼働できるだろうという予想だ。よって、3年はメンテナンスフリーでいけるだろう、ということである。
そのほか、RosemaryやQuinceとは異なり、今回初めて底板にステンレスを使用し、若干ながら放射線に対する遮蔽性を高めたことも発表された。それと、全高がRosemaryやQuinceよりも上がっているのは、重心を下げるためにバッテリを最下部に積んだことが理由だそうだ。
それから通信用ケーブルに関しては、自動巻取り機能がさらに強化され、オペレーターがいちいち気にかけなくても大丈夫なようになっている。ただでさえ、瓦礫などがあり、水で濡れていたりして一歩間違えば滑落という急傾斜の階段を戻る時など、いちいちケーブルにまで気を配っていたら操縦がままならないので、その点は工夫したという(絡んで自分のクローラなどで切断してしまわないようになっている)。そして、RosemaryやQuinceではケーブルを500m分を積んでいたが、それほど必要ないということから300mに減らし、軽量化が図られている。
また、Sakuraは、今後想定される災害対応無人化システム遠隔建設機械などを支援する「眼」としての使用が想定されている点も付記しておく。
なお現場への投入時期は、まだ完成したばかりであり、少なくとも数週間から1カ月は、動作させてメカニズム的に安定させる必要があり、さらにモックアップ施設などでの実証試験により性能などを評価することから、急いでいるとはいえ、年内はないだろうとしている。
そして驚くべきことに、今回のSakuraが機動性重視の軽量タイプなら、可搬重量100kgオーバーという装備の面を重視した重量級も開発中ということで、1カ月から1カ月半後には、「T」で始まる花がつけられた機体を発表できると、小柳氏は語った。
ガンマ線カメラなどで非常に高性能なものを積む場合、性能がよければよいほどレンズが重たくなるため、高機動で偵察能力を高めたSakuraと、そこから得られたデータを基に移動先を絞り込んでから活動する、主力ともいうべき重量級とのコンビネーションが考えられているようだ。
ちなみにJapan Robot Week 2012のNEDOブースでは3日間にわたってSakuraほか、Rosemary、Quince、kenafのほか、CYBERDYNEの災害対策用ロボットスーツHALの展示も行われる。
さらに、18日に今回のNEDOの災害対応無人化システム研究開発プロジェクト関連の講演やデモンストレーションが行われる予定だ。
スケジュールは、10時30分から11時5分までがNEDO技術開発推進部川島正氏による「災害対応無人化システム研究開発プロジェクト 中間報告」、11時10分から同45分までが、小柳氏による「災害ロボットの開発と課題」、そして11時50分から12時25分までがCYBERDYNE代表取締役社長の山海嘉之氏による「ロボットスーツHALの新たな社会的活用法:災害対策用HAL」となっている。HALの講演では、災害対策用HALのデモンストレーションも実施される予定だ。
(デイビー日高@ロボタイムズ)
[マイナビニュース]


 歩道施工前
歩道施工前 歩道施工後
歩道施工後 (2012年 10/4)
(2012年 10/4)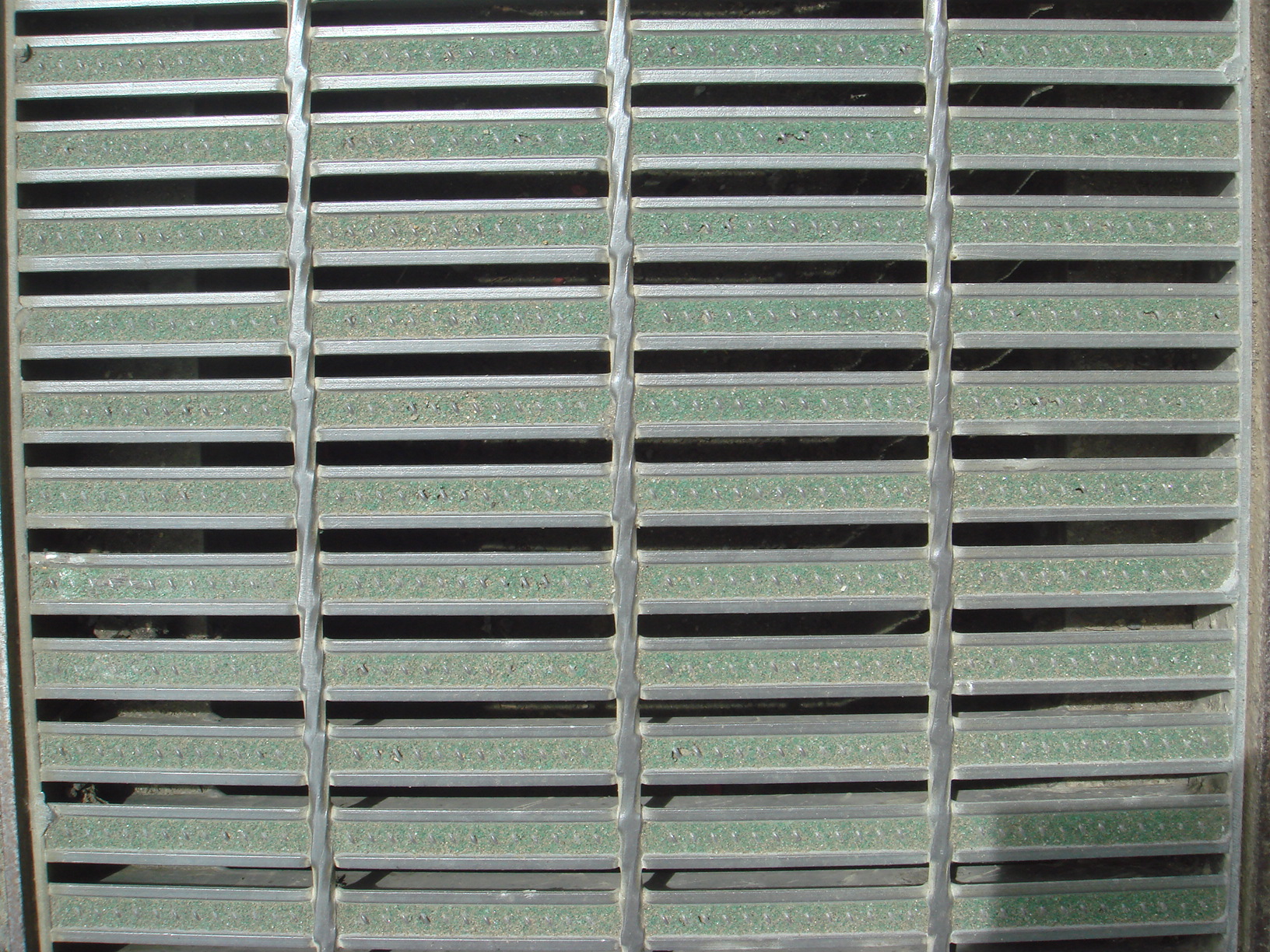{kind=link}